microcontrollers:common_communication_types
This is an old revision of the document!
Table of Contents
MSP430: Common Communication Types
SPI (Serial Peripheral Interface)
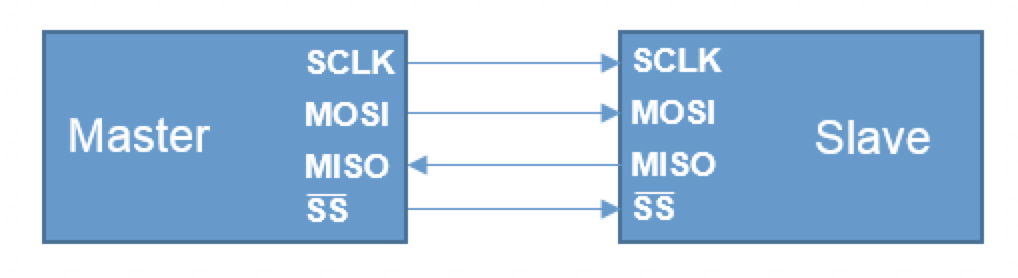
- SCLK – Main clock synchronizing SPI on both devices. Generated by the Master to all the slaves
- MOSI – Master Output and Slave Input in which data is sent from the master to the slave on each clock edge
- MISO – Master Input and Slave Output in which data is sent from the slave to the master on each clock edge
- SS – Slave select, often called CS (Chip Select) or CSn. This line selects the current active slave. It could be Active Low or Active high (refer to the slave datasheet)
SPI Modes- Phase (PH) and Polarity (POL) bits
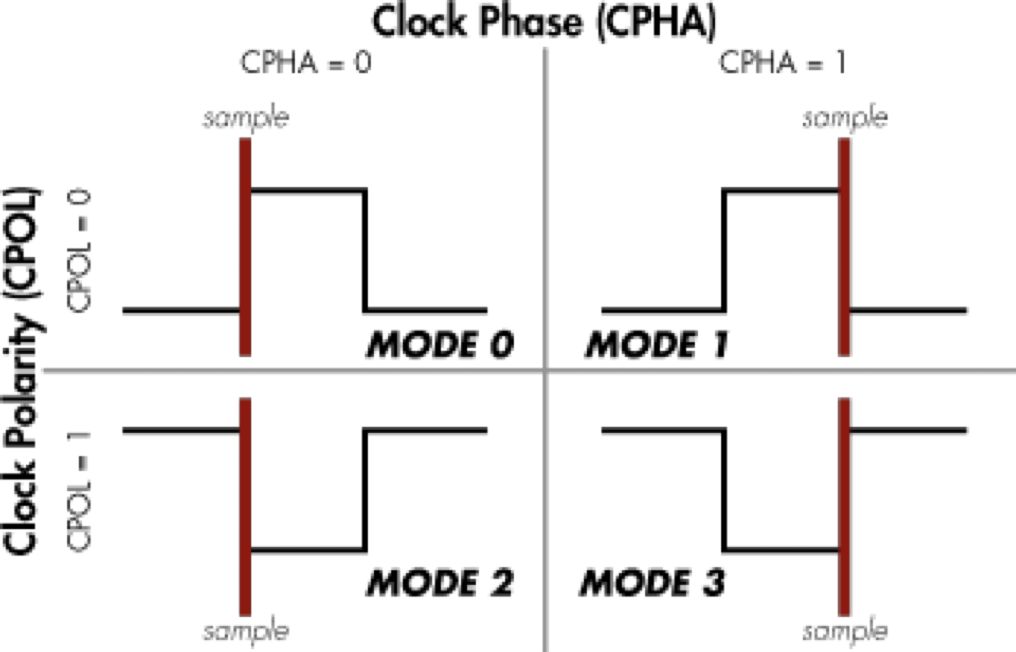
- CPHA/CKPH = 0, Read on the leading edge of each clock pulse. Written on the trailing edge of each clock pulse.
- CPHA/ CKPH = 1 , Written on the leading edge of each clock pulse. Read on the trailing edge of each clock pulse.
- CPOL/CKPL = 0 Clock idles low between transfers.
- CPOL/CKPL = 1 Clock idles High between transfers.
A combination of phase and polarity produces 4 standard modes for the clock in SPI:
| Mode | CPOL/CKPL | CPHA/CKPH |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 1 |
| 2 | 1 | 0 |
| 3 | 1 | 1 |
It is important that the right phase and polarity are selected so that the slave and master both capture the bit at the correct clock transition.
UART (Universal Asynchronous Receiver-Transmitter)
I2C (Inter-Integrated Circuit)
microcontrollers/common_communication_types.1730314760.txt.gz · Last modified: by ibchadmin